
We see what
others can't.
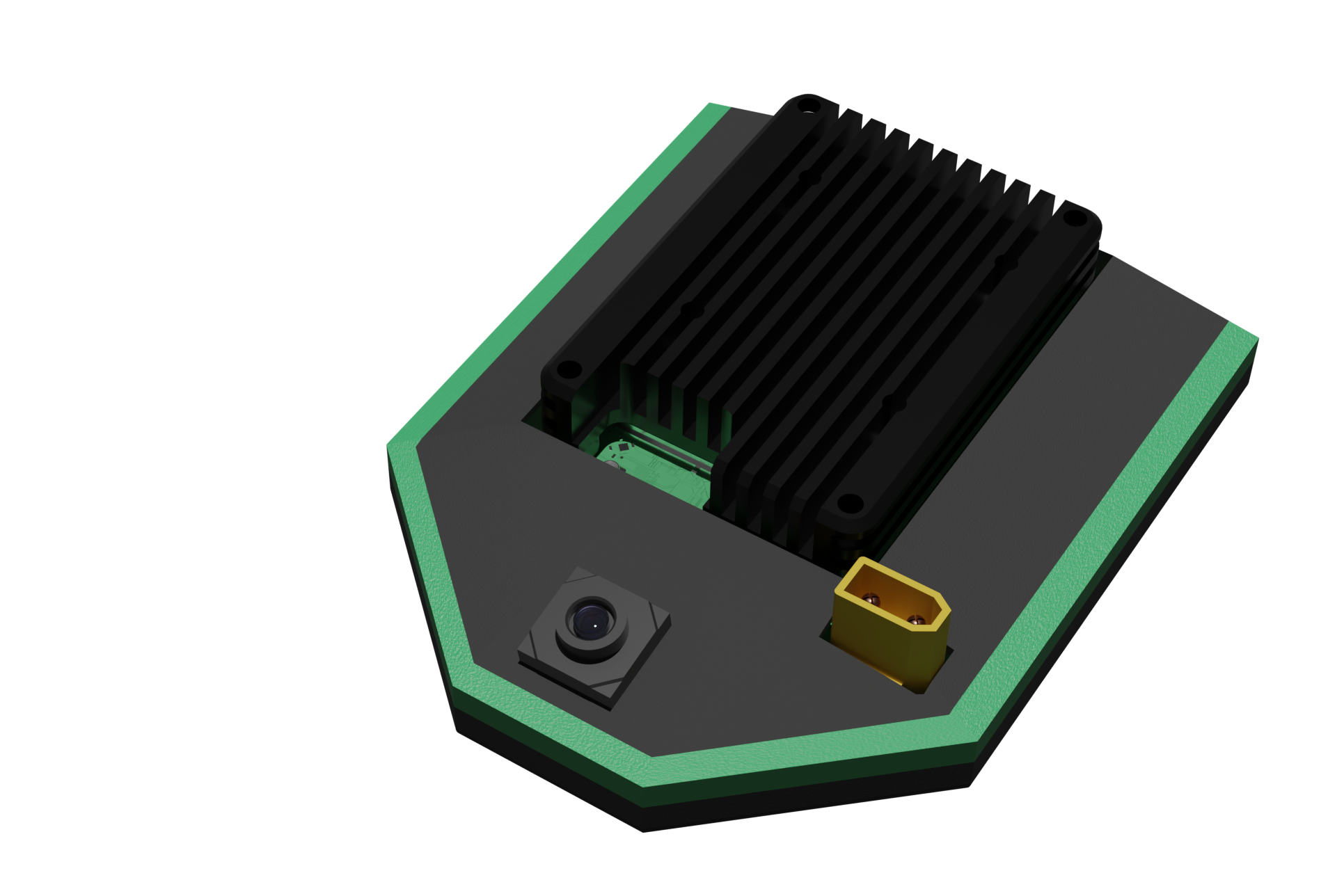
WINGMAN-LITE
For small-sized UAVs
GPS is amazing, but what if there is no signal?
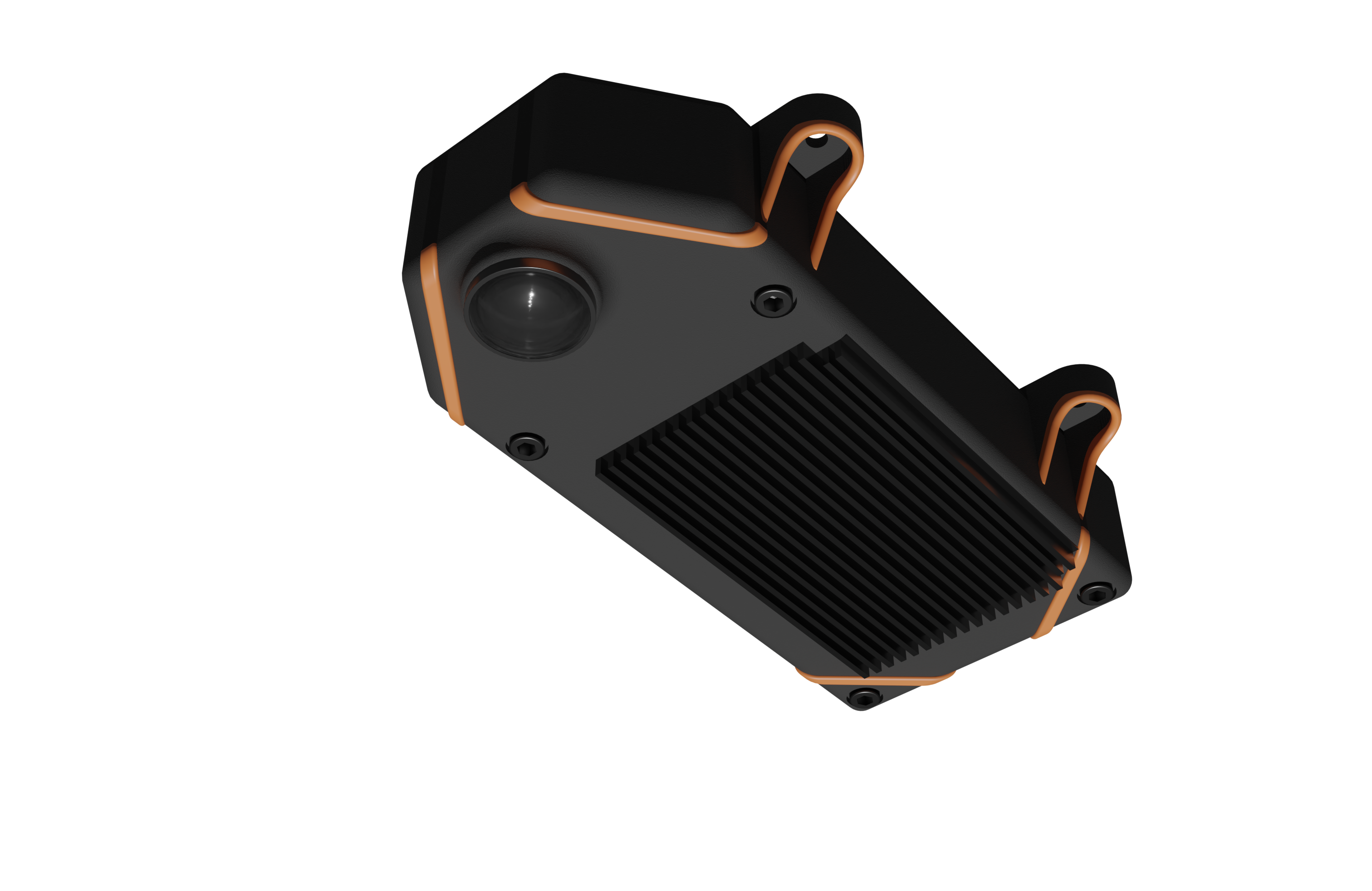
WINGMAN-PRO
For medium/large sized UAVs
Our modules let any drone fly, anywhere.
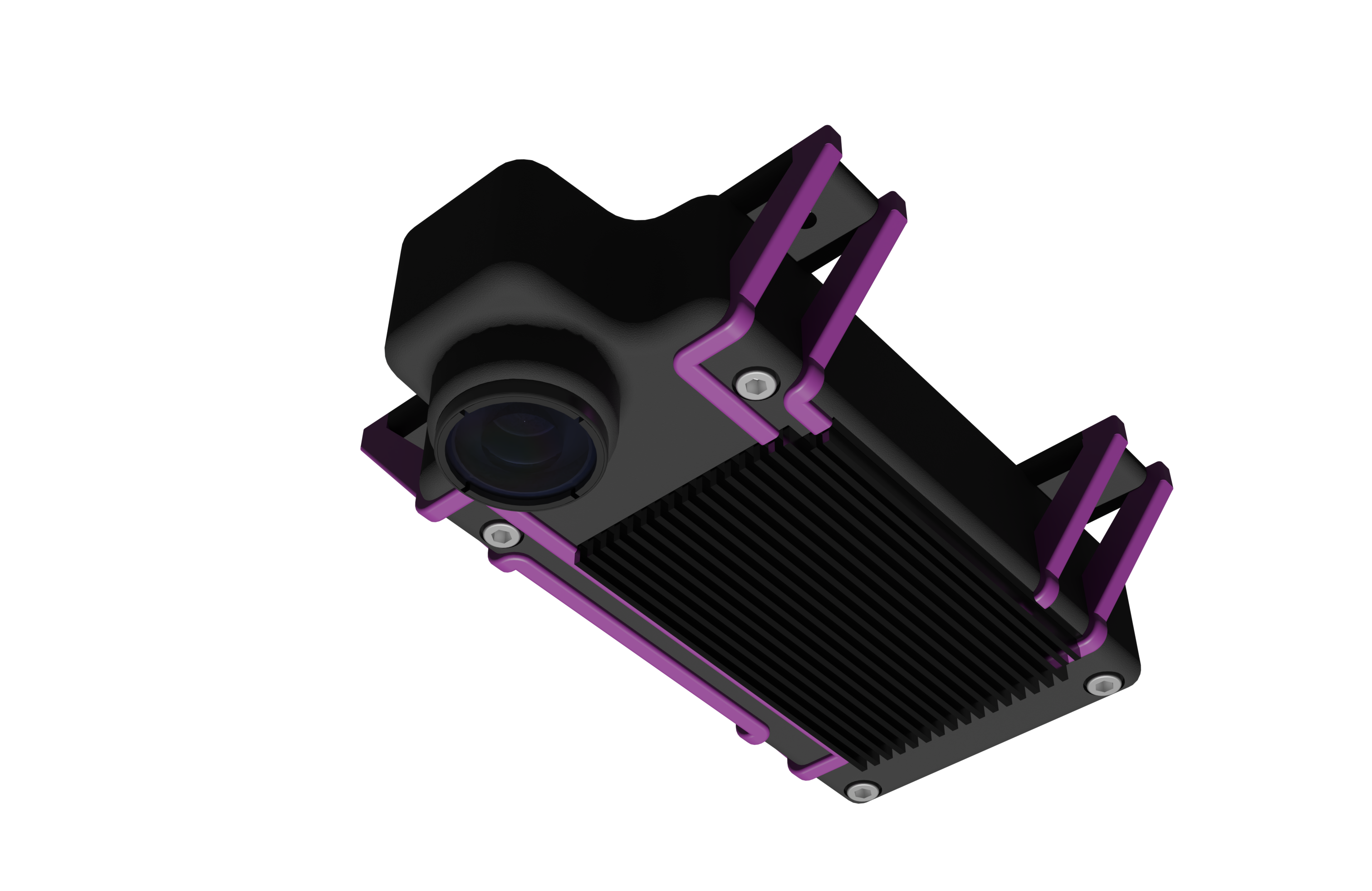
WINGMAN-NIGHT
For large sized UAVs at night
GNSS DENIED APPLICATIONS
Our visual positioning technology operates where GPS fails, enabling autonomous operations in the most challenging environments.